DataChange
The data_change module provides tools to model realistic sensor data. In particular, it allows you to:
Corrupt ideal signals to simulate realistic hardware behavior via the
data_change.corruptsubclassClean corrupted signals for downstream use in estimators and controllers via the
data_change.cleansubclass
This notebook demonstrates all corruption and preparation methods available in pykal.data_change, using visual examples to illustrate how each transformation affects the underlying signal.
References and Examples
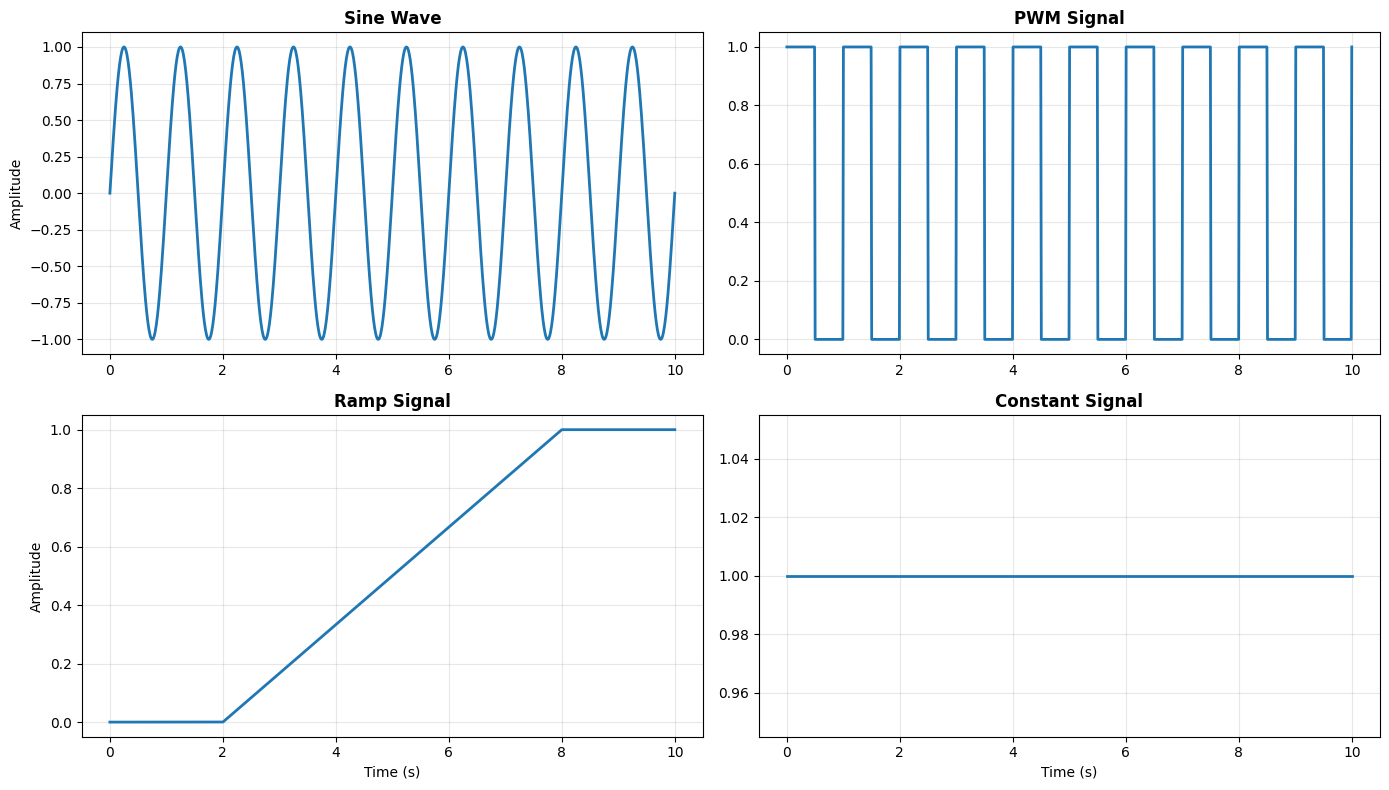
We first generate a representative set of reference signals using the DynamicalSystem class. In the remaining sections, we demonstrate corrupting these signals via
Gaussian noise (thermal noise / ADC noise)
Bias offsets (uncalibrated zero errors)
Drift (time-varying bias from warm-up / temperature)
Quantization (finite ADC resolution)
Spikes / outliers (EMI glitches, electrical transients)
Clipping / saturation (sensor range limits)
Packet loss / dropouts (missing samples, intermittent links)
Contact bounce (encoders, switches, digital edges)
Latency / delay (communication + processing lag)
and then, when cleaning operations are available, demonstrating how to clean the corrupted signals, using such methods as
moving average / low-pass filtering (noise suppression)
median filtering (outlier rejection without blurring edges)
exponential smoothing (real-time filtering)
debouncing (stable digital transitions)
outlier handling (replace or interpolate)
interpolation (filling missing samples)
staleness policies for asynchronous sensors (hold/zero/drop/none)
calibration (bias + scale correction)
Generate Reference Signals
import numpy as np
import matplotlib.pyplot as plt
from pykal import DynamicalSystem
# -----------------------------
# Reference signals (stateless)
# -----------------------------
def sine_wave(tk: float, f_hz: float, amplitude: float, phase: float) -> float:
"""y(t) = A sin(2π f t + φ)"""
return amplitude * np.sin(2.0 * np.pi * f_hz * tk + phase)
def ramp(tk: float, t0: float, t1: float, y0: float, y1: float) -> float:
"""Linear ramp from (t0, y0) to (t1, y1), clamped outside interval."""
if tk <= t0:
return y0
if tk >= t1:
return y1
s = (tk - t0) / (t1 - t0)
return (1.0 - s) * y0 + s * y1
def constant(c: float) -> float:
"""y(t) = c"""
return c
def pwm(tk: float, f_hz: float, duty: float, low: float, high: float) -> float:
"""
Pulse-width modulation (PWM).
"""
T = 1.0 / f_hz
phase = tk % T
return high if phase < duty * T else low
# Wrapping signals in DynamicalSystem objects
ref_sine_wave = DynamicalSystem(h=sine_wave)
ref_constant = DynamicalSystem(h=constant)
ref_ramp = DynamicalSystem(h=ramp)
ref_pwm = DynamicalSystem(h=pwm)
# Simulating signals over time
T = np.linspace(0, 10, 1000)
Y_sin = []
Y_const = []
Y_ramp = []
Y_pwm = []
for tk in T:
Y_sin.append(
ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
)
Y_const.append(ref_constant.step(params={"c": 1}))
Y_ramp.append(
ref_ramp.step(params={"tk": tk, "t0": 2.0, "t1": 8.0, "y0": 0.0, "y1": 1.0})
)
Y_pwm.append(
ref_pwm.step(
params={"tk": tk, "f_hz": 1.0, "duty": 0.5, "low": 0.0, "high": 1.0}
)
)
Gaussian Noise
Thanks to the Central Limit Theorem, sensor noise can often be modeled as the true sensor value plus zero-mean Gaussian noise. That is, the noisy output of the sensor, which we denote \(\tilde{y}_k\), is
where \(r_k \sim \mathcal{N}\bigl(0,\, \sigma \bigr)\).
API reference: pykal.data_change.corrupt.with_gaussian_noise().
from pykal.data_change import corrupt, clean
Y_clean_sin = []
Y_noisy_sin = []
for tk in T:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
yk_corrupted = corrupt.with_gaussian_noise(yk, mean=0.0, std=0.2)
Y_clean_sin.append(yk)
Y_noisy_sin.append(yk_corrupted)
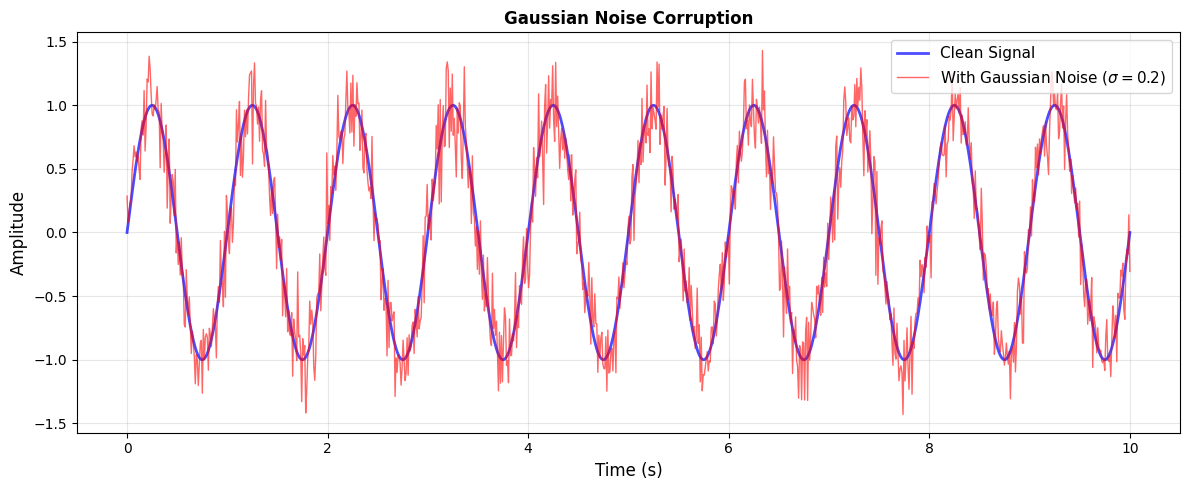
Original std: 0.7068
Corrupted std: 0.7247
Noise added: 0.1977
Multivariate Gaussian Noise (with covariance matrix):
For vector-valued sensors (e.g., 3-axis IMU), noise is often correlated across channels. The noisy measurement is
where \(\mathbf{r}_k \sim \mathcal{N}(\mathbf{0}, \mathbf{Q})\) and \(\mathbf{Q}\) is the covariance matrix capturing both individual channel noise levels and cross-channel correlations.
API reference: pykal.data_change.corrupt.with_gaussian_noise() (with Q parameter).
# 3D IMU example: accelerometer with different noise per axis
# Covariance: x low noise, y medium, z high (with small correlations)
Q = np.array([[0.01, 0.002, 0.0], [0.002, 0.05, 0.01], [0.0, 0.01, 0.1]])
# Generate 100 samples from three reference signals
T_imu = np.linspace(0, 10, 100)
IMU_clean = []
IMU_noisy = []
for i, tk in enumerate(T_imu):
# Generate clean 3D signal (sine, ramp, constant)
x_clean = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
y_clean = ref_ramp.step(
params={"tk": tk, "t0": 2.0, "t1": 8.0, "y0": 0.0, "y1": 1.0}
)
z_clean = ref_constant.step(params={"c": 1})
clean_vec = np.array([x_clean, y_clean, z_clean])
# Apply multivariate Gaussian noise in the loop
noisy_vec = corrupt.with_gaussian_noise(clean_vec, Q=Q, seed=i)
IMU_clean.append(clean_vec)
IMU_noisy.append(noisy_vec)
---------------------------------------------------------------------------
TypeError Traceback (most recent call last)
Cell In[5], line 22
20 clean_vec = np.array([x_clean, y_clean, z_clean])
21 # Apply multivariate Gaussian noise in the loop
---> 22 noisy_vec = corrupt.with_gaussian_noise(clean_vec, Q=Q, seed=i)
24 IMU_clean.append(clean_vec)
25 IMU_noisy.append(noisy_vec)
TypeError: corrupt.with_gaussian_noise() got an unexpected keyword argument 'Q'
Moving Average Filter
The moving average filter smooths noisy signals by replacing each sample with the average of its neighbors:
where \(w\) is the window size. This reduces high-frequency noise but introduces phase lag proportional to \(w/2\).
Best for: reducing Gaussian noise Tradeoff: introduces lag, reduces bandwidth
API reference: pykal.data_change.clean.with_moving_average().
T_ma = np.linspace(0, 10, 1000)
Y_original = []
Y_noisy = []
Y_smoothed = []
for tk in T_ma:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
yk_noisy = corrupt.with_gaussian_noise(yk, std=0.3)
Y_original.append(yk)
Y_noisy.append(yk_noisy)
# Apply moving average after generation
Y_noisy_arr = np.array(Y_noisy)
Y_smoothed = clean.with_moving_average(Y_noisy_arr, window=10)
Exponential Smoothing
Exponential smoothing is a recursive filter ideal for real-time applications:
where \(\alpha \in [0,1]\) controls the smoothing strength. Larger \(\alpha\) responds faster but smooths less; smaller \(\alpha\) provides more smoothing but reacts slower to changes.
Best for: real-time filtering Parameter: \(\alpha \in [0,1]\)
API reference: pykal.data_change.clean.with_exponential_smoothing().
T_exp = np.linspace(0, 10, 1000)
Y_clean_exp = []
Y_noisy_exp = []
Y_smoothed_03 = []
Y_smoothed_05 = []
Y_smoothed_08 = []
# Initialize exponential smoothing state for each alpha
y_prev_03 = 0.0
y_prev_05 = 0.0
y_prev_08 = 0.0
for tk in T_exp:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
yk_noisy = corrupt.with_gaussian_noise(yk, std=0.25)
# Apply exponential smoothing in the loop (recursive)
y_smooth_03 = 0.3 * yk_noisy + (1 - 0.3) * y_prev_03
y_smooth_05 = 0.5 * yk_noisy + (1 - 0.5) * y_prev_05
y_smooth_08 = 0.8 * yk_noisy + (1 - 0.8) * y_prev_08
# Update previous values
y_prev_03 = y_smooth_03
y_prev_05 = y_smooth_05
y_prev_08 = y_smooth_08
Y_clean_exp.append(yk)
Y_noisy_exp.append(yk_noisy)
Y_smoothed_03.append(y_smooth_03)
Y_smoothed_05.append(y_smooth_05)
Y_smoothed_08.append(y_smooth_08)
# Convert to arrays
smoothed_alpha_03 = np.array(Y_smoothed_03)
smoothed_alpha_05 = np.array(Y_smoothed_05)
smoothed_alpha_08 = np.array(Y_smoothed_08)
Low-Pass Filter (First-Order)
A first-order low-pass filter attenuates high-frequency components while passing low frequencies:
Equivalent to exponential smoothing, but interpreted in the frequency domain with cutoff frequency \(f_c = \alpha f_s / (2\pi)\) where \(f_s\) is the sampling rate.
Best for: attenuating high-frequency noise Parameter: \(\alpha \in [0,1]\)
API reference: pykal.data_change.clean.with_low_pass_filter().
T_lp = np.linspace(0, 10, 1000)
Y_clean_lp = []
Y_noisy_lp = []
Y_filtered = []
# Initialize low-pass filter state
y_prev = 0.0
alpha = 0.1
for tk in T_lp:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
yk_noisy = corrupt.with_gaussian_noise(yk, std=0.3)
# Apply low-pass filter in the loop (recursive)
y_filtered = alpha * yk_noisy + (1 - alpha) * y_prev
y_prev = y_filtered
Y_clean_lp.append(yk)
Y_noisy_lp.append(yk_noisy)
Y_filtered.append(y_filtered)
# Convert to array
filtered_lp = np.array(Y_filtered)
Contact Bounce
Mechanical switches and encoders exhibit contact bounce—rapid oscillations near transitions before settling to a stable value:
where \(A\) is the bounce amplitude and \(d\) is the bounce duration in samples. This non-ideal behavior occurs due to mechanical spring forces causing contacts to vibrate.
Hardware source: mechanical switches and encoders that chatter near transitions Common in: digital inputs, rotary encoders, limit switches
API reference: pykal.data_change.corrupt.with_bounce().
T_bounce = np.linspace(0, 4, 400)
Y_step = []
Y_bounced = []
for tk in T_bounce:
# Generate step signal: 0 before t=2, 1 after
yk = 0.0 if tk < 2.0 else 1.0
Y_step.append(yk)
# Apply bounce corruption after generation
step_signal = np.array(Y_step)
bounced_step = corrupt.with_bounce(step_signal, duration=5, amplitude=0.3, seed=42)
Debounce
Debouncing removes contact bounce by requiring signal stability for a minimum duration before accepting a transition:
where \(\epsilon\) is the stability threshold and \(d\) is the minimum stable duration. This implements a form of temporal hysteresis.
Best for: removing contact bounce from digital signals Idea: require stability for a minimum duration before accepting transitions
API reference: pykal.data_change.clean.with_debounce().
T_debounce = np.linspace(0, 4, 400)
Y_step_debounce = []
for tk in T_debounce:
yk = 0.0 if tk < 2.0 else 1.0
Y_step_debounce.append(yk)
# Apply bounce and debounce
step_signal = np.array(Y_step_debounce)
bounced_step_2 = corrupt.with_bounce(step_signal, duration=8, amplitude=0.4, seed=46)
debounced = clean.with_debounce(bounced_step_2, threshold=0.2, min_duration=3)
Dropouts (Packet Loss)
Wireless communication and intermittent sensor connections cause random samples to be missing:
where \(p\) is the dropout rate. Missing samples are marked as NaN and must be handled by downstream processing.
Hardware source: wireless links, intermittent buses, sensor hiccups Common in: WiFi sensors, BLE devices, multi-robot comms
API reference: pykal.data_change.corrupt.with_dropouts().
T_dropout = np.linspace(0, 10, 1000)
Y_sine_dropout = []
Y_dropped = []
np.random.seed(42)
dropout_rate = 0.2
for tk in T_dropout:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Apply dropout in the loop (probabilistic per-sample)
if np.random.rand() < dropout_rate:
yk_dropped = np.nan
else:
yk_dropped = yk
Y_sine_dropout.append(yk)
Y_dropped.append(yk_dropped)
# Convert to arrays
sine_wave = np.array(Y_sine_dropout)
dropped_sine = np.array(Y_dropped)
Interpolation (Fill Missing Data)
Interpolation fills missing samples (NaN values) using neighboring valid data:
Linear interpolation: $\( \hat{y}_k = y_i + \frac{k - i}{j - i}(y_j - y_i) \)\( where \)i < k < j\( and \)y_i, y_j$ are the nearest valid samples.
Nearest-neighbor interpolation: $\( \hat{y}_k = y_{\arg\min_i |k - i|} \)$
Best for: dropouts (NaN values) Methods: linear (smooth), nearest-neighbor (preserves steps)
API reference: pykal.data_change.clean.with_interpolation().
T_interp = np.linspace(0, 10, 1000)
Y_sine_interp = []
for tk in T_interp:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
Y_sine_interp.append(yk)
# Apply dropouts and interpolation
sine_wave = np.array(Y_sine_interp)
dropped_sine_2 = corrupt.with_dropouts(sine_wave, dropout_rate=0.15, seed=48)
filled_linear = clean.with_interpolation(dropped_sine_2, method="linear")
filled_nearest = clean.with_interpolation(dropped_sine_2, method="nearest")
Asynchronous / Multi-Rate Data
Hardware source: sensors sampling at different rates, non-uniform timing Common in: sensor fusion (IMU @ 100Hz, GPS @ 10Hz, camera @ 30Hz)
# Simulate three sensors with different sampling rates
t_fast = np.arange(0, 2, 0.01) # 100 Hz
t_medium = np.arange(0, 2, 0.033) # ~30 Hz
t_slow = np.arange(0, 2, 0.1) # 10 Hz
# Generate fast sensor data
signal_fast = []
for tk in t_fast:
yk = np.sin(2 * np.pi * 1.5 * tk)
signal_fast.append(yk)
signal_fast = np.array(signal_fast)
signal_fast_noisy = corrupt.with_gaussian_noise(signal_fast, std=0.05, seed=60)
# Generate medium sensor data
signal_medium = []
for tk in t_medium:
yk = np.sin(2 * np.pi * 1.5 * tk)
signal_medium.append(yk)
signal_medium = np.array(signal_medium)
signal_medium_noisy = corrupt.with_gaussian_noise(signal_medium, std=0.08, seed=61)
# Generate slow sensor data
signal_slow = []
for tk in t_slow:
yk = np.sin(2 * np.pi * 1.5 * tk)
signal_slow.append(yk)
signal_slow = np.array(signal_slow)
signal_slow_noisy = corrupt.with_gaussian_noise(signal_slow, std=0.1, seed=62)
Kalman Filter Multi-Rate Sensor Fusion
The optimal solution for fusing asynchronous sensors with different noise characteristics is the Kalman filter. Here we demonstrate:
Fast sensor (100 Hz): High rate but noisy (σ = 0.3)
Slow sensor (10 Hz): Low rate but accurate (σ = 0.05)
Kalman filter: Optimally weights both based on their noise characteristics

from pykal.algorithm_library.estimators.kf import KF
# True state evolution: simple 1D constant velocity
# State: [position, velocity]
dt_sim = 0.01 # Simulation timestep (100 Hz)
t_total = 2.0
t_sim = np.arange(0, t_total, dt_sim)
# True state trajectory
true_pos = np.sin(2 * np.pi * 0.5 * t_sim) # Sinusoidal position
true_vel = 2 * np.pi * 0.5 * np.cos(2 * np.pi * 0.5 * t_sim) # Derivative
# Generate sensor measurements
# Fast sensor: measures position every 0.01s (100 Hz) with high noise
fast_noise_std = 0.3
np.random.seed(100)
fast_measurements = true_pos + np.random.normal(0, fast_noise_std, len(t_sim))
# Slow sensor: measures position every 0.1s (10 Hz) with low noise
slow_rate = 10 # Every 10 samples
slow_noise_std = 0.05
slow_measurements = np.full_like(true_pos, np.nan)
slow_measurements[::slow_rate] = true_pos[::slow_rate] + np.random.normal(
0, slow_noise_std, len(true_pos[::slow_rate])
)
# Kalman filter setup - constant velocity model
# State: x = [position, velocity]^T
# Dynamics: position_{k+1} = position_k + velocity_k * dt
# velocity_{k+1} = velocity_k
# State transition matrix (constant for linear system)
def get_F(dt):
return np.array([[1.0, dt], [0.0, 1.0]])
# Measurement matrix (observe position only)
H = np.array([[1.0, 0.0]])
# Process noise covariance
Q = np.diag([0.01, 0.01])
# Measurement noise covariances
R_fast = np.array([[fast_noise_std**2]])
R_slow = np.array([[slow_noise_std**2]])
# Initialize state estimate
x_est = np.array([[0.0], [0.0]]) # Start at origin with zero velocity
P_est = np.diag([1.0, 1.0]) # Initial uncertainty
# Storage
kf_positions = []
kf_velocities = []
# Run Kalman filter
for i in range(len(t_sim)):
# Predict step (always done)
F = get_F(dt_sim)
x_pred = F @ x_est # State prediction
P_pred = F @ P_est @ F.T + Q # Covariance prediction
# Update step (if measurement available)
has_slow = not np.isnan(slow_measurements[i])
has_fast = not np.isnan(fast_measurements[i])
if has_slow:
# Use slow (accurate) sensor
z = np.array([[slow_measurements[i]]])
R = R_slow
elif has_fast:
# Use fast (noisy) sensor
z = np.array([[fast_measurements[i]]])
R = R_fast
else:
# No measurement - use prediction
x_est = x_pred
P_est = P_pred
kf_positions.append(x_est[0, 0])
kf_velocities.append(x_est[1, 0])
continue
# Kalman gain
S = H @ P_pred @ H.T + R
K = P_pred @ H.T @ np.linalg.inv(S)
# Update estimate
y_pred = H @ x_pred
innovation = z - y_pred
x_est = x_pred + K @ innovation
P_est = (np.eye(2) - K @ H) @ P_pred
kf_positions.append(x_est[0, 0])
kf_velocities.append(x_est[1, 0])
kf_positions = np.array(kf_positions)
kf_velocities = np.array(kf_velocities)
# Compute errors
fast_error_rms = np.sqrt(np.mean((fast_measurements - true_pos) ** 2))
slow_error_rms = np.sqrt(np.nanmean((slow_measurements - true_pos) ** 2))
kf_error_rms = np.sqrt(np.mean((kf_positions - true_pos) ** 2))
print(f"Fast sensor RMS error: {fast_error_rms:.4f}")
print(f"Slow sensor RMS error: {slow_error_rms:.4f}")
print(f"Kalman filter RMS error: {kf_error_rms:.4f}")
print(f"\nImprovement over fast sensor: {(1 - kf_error_rms/fast_error_rms)*100:.1f}%")
print(f"Improvement over slow sensor: {(1 - kf_error_rms/slow_error_rms)*100:.1f}%")
Staleness Policy (Asynchronous Sensors)
Asynchronous sensors arrive at different times, requiring policies for handling missing data:
Policies:
zero: \(\hat{y}_k = 0\) if NaN (assumes baseline state)hold: \(\hat{y}_k = \hat{y}_{k-1}\) if NaN (zero-order hold)drop: remove NaN samples entirely (variable-rate output)none: keep NaN (downstream must handle)
This is critical for robotics where sensor fusion often happens across streams without a shared clock.
Best for: multi-rate or intermittent sensors
API reference: pykal.data_change.clean.with_staleness_policy().
T_stale = np.linspace(0, 2, 200)
Y_sine_stale = []
Y_intermittent = []
Y_handled_zero = []
Y_handled_hold = []
np.random.seed(49)
dropout_rate = 0.3
y_prev_hold = 0.0 # Initialize hold policy state
for tk in T_stale:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Apply dropouts
if np.random.rand() < dropout_rate:
yk_intermittent = np.nan
else:
yk_intermittent = yk
# Apply staleness policies in the loop
# Zero policy: replace NaN with 0
if np.isnan(yk_intermittent):
yk_zero = 0.0
else:
yk_zero = yk_intermittent
# Hold policy: forward-fill last valid value
if np.isnan(yk_intermittent):
yk_hold = y_prev_hold
else:
yk_hold = yk_intermittent
y_prev_hold = yk_hold
Y_sine_stale.append(yk)
Y_intermittent.append(yk_intermittent)
Y_handled_zero.append(yk_zero)
Y_handled_hold.append(yk_hold)
# Convert to arrays
sine_wave = np.array(Y_sine_stale)
intermittent_signal = np.array(Y_intermittent)
handled_zero = np.array(Y_handled_zero)
handled_hold = np.array(Y_handled_hold)
# Drop policy requires removing NaN, so use array-based approach
handled_drop = clean.with_staleness_policy(intermittent_signal, policy="drop")
Constant Bias
Constant bias offsets arise from uncalibrated zero-errors or systematic measurement offsets:
where \(b\) is the constant bias. Common causes include ADC offset voltage, sensor mounting misalignment, or gravitational effects on accelerometers.
Hardware source: zero-offset error, poor calibration Common in: IMUs, force/torque sensors, pressure sensors
API reference: pykal.data_change.corrupt.with_bias().
T_bias = np.linspace(0, 10, 1000)
Y_sine_bias = []
Y_biased = []
bias = 1.5
for tk in T_bias:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Apply constant bias in the loop
yk_biased = yk + bias
Y_sine_bias.append(yk)
Y_biased.append(yk_biased)
# Convert to arrays
sine_wave = np.array(Y_sine_bias)
biased_sine = np.array(Y_biased)
Calibration (Remove Bias and Scale)
Calibration corrects both bias (additive error) and scale (multiplicative error):
where \(b\) is the bias offset and \(s\) is the scale factor. These parameters are typically determined from known reference measurements during a calibration procedure.
Best for: correcting systematic sensor errors after calibration data is available
API reference: pykal.data_change.clean.with_calibration().
T_calib = np.linspace(0, 10, 1000)
Y_sine_calib = []
Y_miscalibrated = []
Y_calibrated = []
# Calibration parameters
scale_error = 2.0
bias_error = 3.0
# Correction parameters
offset = 3.0
scale = 0.5
for tk in T_calib:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Apply miscalibration in the loop
yk_miscal = yk * scale_error + bias_error
# Apply calibration correction in the loop
yk_calib = scale * (yk_miscal - offset)
Y_sine_calib.append(yk)
Y_miscalibrated.append(yk_miscal)
Y_calibrated.append(yk_calib)
# Convert to arrays
sine_wave = np.array(Y_sine_calib)
miscalibrated = np.array(Y_miscalibrated)
calibrated = np.array(Y_calibrated)
Drift (Time-Dependent Bias)
Drift is a slowly varying bias that changes over time, often due to thermal effects or sensor warm-up:
Linear drift: $\( \tilde{y}_k = y_k + r \cdot k \cdot \Delta t \)$
Exponential drift: $\( \tilde{y}_k = y_k + r \cdot (1 - e^{-k \cdot \Delta t / \tau}) \)$
where \(r\) is the drift rate, \(\Delta t\) is the sample period, and \(\tau\) is the time constant. Gyroscopes are particularly susceptible to drift due to bias instability.
Hardware source: warm-up, temperature dependence, slow degradation Common in: gyros, barometers, thermal sensors
API reference: pykal.data_change.corrupt.with_drift().
T_drift = np.linspace(0, 10, 1000)
Y_const_drift = []
Y_drifted_linear = []
Y_drifted_exp = []
dt = T_drift[1] - T_drift[0] # Sample period
drift_rate_linear = 0.1
drift_rate_exp = 0.05
for k, tk in enumerate(T_drift):
yk = ref_constant.step(params={"c": 1})
# Apply linear drift in the loop
yk_drift_linear = yk + drift_rate_linear * k * dt
# Apply exponential drift in the loop
yk_drift_exp = yk + drift_rate_exp * (1 - np.exp(-k * dt))
Y_const_drift.append(yk)
Y_drifted_linear.append(yk_drift_linear)
Y_drifted_exp.append(yk_drift_exp)
# Convert to arrays
constant_signal = np.array(Y_const_drift)
drifted_constant_linear = np.array(Y_drifted_linear)
drifted_constant_exp = np.array(Y_drifted_exp)
Quantization (ADC Resolution Limits)
Analog-to-digital converters have finite resolution, mapping continuous voltages to discrete levels:
where \(\Delta = (y_{\max} - y_{\min}) / (L - 1)\) is the quantization step and \(L\) is the number of levels (\(L = 2^n\) for an \(n\)-bit ADC). This introduces quantization error \(|y_k - \tilde{y}_k| \leq \Delta/2\).
Hardware source: finite-bit ADCs Common in: essentially all analog sensors
API reference: pykal.data_change.corrupt.with_quantization().
T_quant = np.linspace(0, 2, 200)
Y_sine_quant = []
Y_quant_8bit = []
Y_quant_4bit = []
for tk in T_quant:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Apply 8-bit quantization in the loop (256 levels)
y_min, y_max = -1.0, 1.0
delta_8 = (y_max - y_min) / (256 - 1)
yk_8bit = delta_8 * np.floor((yk - y_min) / delta_8 + 0.5) + y_min
# Apply 4-bit quantization in the loop (16 levels)
delta_4 = (y_max - y_min) / (16 - 1)
yk_4bit = delta_4 * np.floor((yk - y_min) / delta_4 + 0.5) + y_min
Y_sine_quant.append(yk)
Y_quant_8bit.append(yk_8bit)
Y_quant_4bit.append(yk_4bit)
# Convert to arrays
sine_wave = np.array(Y_sine_quant)
quantized_sine_8bit = np.array(Y_quant_8bit)
quantized_sine_4bit = np.array(Y_quant_4bit)
Spikes / Outliers
Electromagnetic interference and electrical transients cause sporadic large-magnitude errors:
where \(p\) is the spike rate and \(A\) is the spike magnitude. Unlike Gaussian noise which affects every sample, spikes are rare but severe deviations.
Hardware source: EMI, electrical transients, sensor glitches Common in: unshielded sensors, motors switching, noisy power rails
API reference: pykal.data_change.corrupt.with_spikes().
T_spike = np.linspace(0, 10, 1000)
Y_sine_spike = []
Y_spiked = []
np.random.seed(42)
spike_rate = 0.02
spike_magnitude = 3.0
for tk in T_spike:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Apply spikes in the loop (probabilistic per-sample)
if np.random.rand() < spike_rate:
yk_spiked = yk + spike_magnitude * np.random.randn()
else:
yk_spiked = yk
Y_sine_spike.append(yk)
Y_spiked.append(yk_spiked)
# Convert to arrays
sine_wave = np.array(Y_sine_spike)
spiked_sine = np.array(Y_spiked)
Median Filter
The median filter replaces each sample with the median of its neighbors, providing robust outlier rejection:
where \(w\) is the window size. Unlike mean-based filters, the median is insensitive to outliers (up to 50% contamination) and preserves edges better than moving average.
Best for: removing spikes/outliers while preserving edges
API reference: pykal.data_change.clean.with_median_filter().
T_median = np.linspace(0, 10, 1000)
Y_sine_median = []
for tk in T_median:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
Y_sine_median.append(yk)
# Apply spikes and median filter
sine_wave = np.array(Y_sine_median)
spiked_sine_2 = corrupt.with_spikes(
sine_wave, spike_rate=0.03, spike_magnitude=4.0, seed=44
)
cleaned_median = clean.with_median_filter(spiked_sine_2, window=5)
Outlier Removal (Z-Score)
Statistical outlier detection flags samples exceeding a threshold number of standard deviations from the mean:
where \(\mu\) and \(\sigma\) are robust estimates (median and MAD) and \(\lambda\) is the threshold (typically 2.5-3.0).
Strategies:
Replace: substitute with \(\mu\)
Interpolate: fill using neighboring valid samples
Best for: detecting statistical outliers Strategies: replace with robust statistic or interpolate neighbors
API reference: pykal.data_change.clean.with_outlier_removal().
T_outlier = np.linspace(0, 10, 1000)
Y_sine_outlier = []
for tk in T_outlier:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
Y_sine_outlier.append(yk)
# Apply spikes and outlier removal
sine_wave = np.array(Y_sine_outlier)
spiked_sine_3 = corrupt.with_spikes(
sine_wave, spike_rate=0.05, spike_magnitude=5.0, seed=47
)
cleaned_replace = clean.with_outlier_removal(
spiked_sine_3, threshold=2.5, method="replace"
)
cleaned_interp = clean.with_outlier_removal(
spiked_sine_3, threshold=2.5, method="interpolate"
)
Saturation / Clipping
Sensors and amplifiers have finite measurement ranges, causing large signals to saturate:
Clipped measurements provide no information about the true signal magnitude beyond the saturation limit, making them unsuitable for control or estimation.
Hardware source: sensor range limits, amplifier saturation Common in: force sensors, ADC rails, mechanical stops
API reference: pykal.data_change.corrupt.with_clipping().
T_clip = np.linspace(0, 10, 1000)
Y_sine_clip = []
Y_large = []
Y_clipped = []
lower = -1.0
upper = 1.0
for tk in T_clip:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Scale signal to exceed limits
yk_large = yk * 2.0
# Apply clipping in the loop
yk_clipped = np.clip(yk_large, lower, upper)
Y_sine_clip.append(yk)
Y_large.append(yk_large)
Y_clipped.append(yk_clipped)
# Convert to arrays
sine_wave = np.array(Y_sine_clip)
large_sine = np.array(Y_large)
clipped_sine = np.array(Y_clipped)
Clipping Recovery
Clipping recovery detects saturated values and marks them as invalid (NaN):
where \(\epsilon\) is a small tolerance. This prevents saturated measurements from corrupting estimators or controllers. Often the right move is not to “recover” clipped values, but to refuse to trust them.
Best for: detecting saturated values and marking them invalid for estimators
API reference: pykal.data_change.clean.with_clipping_recovery().
T_clip_rec = np.linspace(0, 10, 1000)
Y_sine_clip_rec = []
Y_large_2 = []
Y_clipped_2 = []
Y_recovered = []
lower = -1.0
upper = 1.0
epsilon = 0.01 # Tolerance for clipping detection
for tk in T_clip_rec:
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Scale signal to exceed limits
yk_large = yk * 2.5
# Apply clipping
yk_clipped = np.clip(yk_large, lower, upper)
# Apply clipping recovery in the loop
if abs(yk_clipped - lower) < epsilon or abs(yk_clipped - upper) < epsilon:
yk_recovered = np.nan # Mark as invalid
else:
yk_recovered = yk_clipped
Y_sine_clip_rec.append(yk)
Y_large_2.append(yk_large)
Y_clipped_2.append(yk_clipped)
Y_recovered.append(yk_recovered)
# Convert to arrays
sine_wave = np.array(Y_sine_clip_rec)
large_sine_2 = np.array(Y_large_2)
clipped_sine_2 = np.array(Y_clipped_2)
recovered = np.array(Y_recovered)
Time Delay / Latency
Communication and processing introduce delays between measurement and availability:
where \(d\) is the delay in samples. In continuous time, this is \(\tilde{y}(t) = y(t - \tau)\) where \(\tau = d \cdot \Delta t\). Delays cause phase lag and can destabilize feedback control systems if not compensated.
Hardware source: comms lag, processing delay, slow sensors Common in: networked sensors, cameras, heavy filtering pipelines
API reference: pykal.data_change.corrupt.with_delay().
T_delay = np.linspace(0, 4, 400)
Y_step_delay = []
for tk in T_delay:
yk = 0.0 if tk < 2.0 else 1.0
Y_step_delay.append(yk)
# Apply delay
step_signal = np.array(Y_step_delay)
delayed_step = corrupt.with_delay(step_signal, delay=50, fill_value=0.0)
Realistic Hardware Pipelines
The point of data_change is not to apply one operator at a time—it’s to build pipelines that match real sensors.
Scenario 1: Noisy IMU Accelerometer
Issues: bias + Gaussian noise + occasional EMI spikes Pipeline: calibration → median filter → low-pass filter
T_imu = np.linspace(0, 10, 1000)
Y_imu_true = []
Y_imu_raw = []
Y_imu_step1 = []
# Set random seed for reproducibility
np.random.seed(51)
# Parameters
bias = 0.5
noise_std = 0.15
spike_rate = 0.01
spike_magnitude = 2.0
calib_offset = 0.5
calib_scale = 1.0
# Generate clean signal, apply per-sample corruptions, and apply calibration in loop
for tk in T_imu:
# Generate clean signal
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Apply bias in the loop
yk_biased = yk + bias
# Apply Gaussian noise in the loop
yk_noisy = yk_biased + np.random.randn() * noise_std
# Apply spikes in the loop
if np.random.rand() < spike_rate:
yk_raw = yk_noisy + spike_magnitude * np.random.randn()
else:
yk_raw = yk_noisy
# Apply calibration in the loop
yk_calibrated = calib_scale * (yk_raw - calib_offset)
Y_imu_true.append(yk)
Y_imu_raw.append(yk_raw)
Y_imu_step1.append(yk_calibrated)
# Convert to arrays for array-based operations
imu_true = np.array(Y_imu_true)
imu_raw = np.array(Y_imu_raw)
imu_step1 = np.array(Y_imu_step1)
# Apply median filter (requires window, must be array-based)
imu_step2 = clean.with_median_filter(imu_step1, window=3)
# Apply low-pass filter in a second loop (recursive operation)
Y_imu_clean = []
y_prev = imu_step2[0] # Initialize with first value
alpha = 0.15
for yk in imu_step2:
y_filtered = alpha * yk + (1 - alpha) * y_prev
y_prev = y_filtered
Y_imu_clean.append(y_filtered)
imu_clean = np.array(Y_imu_clean)
Scenario 2: Bouncing Rotary Encoder
Issues: bounce at transitions Pipeline: debounce
T_encoder = np.linspace(0, 4, 400)
Y_encoder_true = []
for tk in T_encoder:
yk = 0.0 if tk < 2.0 else 1.0
Y_encoder_true.append(yk)
# Apply encoder corruptions and cleaning
encoder_true = np.array(Y_encoder_true)
encoder_raw = corrupt.with_bounce(encoder_true, duration=10, amplitude=0.4, seed=53)
encoder_clean = clean.with_debounce(encoder_raw, threshold=0.2, min_duration=4)
Scenario 3: Wireless Sensor with Packet Loss
Issues: missing samples (NaN) Pipelines:
offline reconstruction: interpolation
real-time robustness: hold staleness policy
T_wireless = np.linspace(0, 10, 1000)
Y_wireless_true = []
Y_wireless_raw = []
# Set random seed for reproducibility
np.random.seed(54)
# Parameters
dropout_rate = 0.25
# Generate clean signal and apply dropouts in the loop
for tk in T_wireless:
# Generate clean signal
yk = ref_sine_wave.step(
params={"tk": tk, "f_hz": 1.0, "amplitude": 1.0, "phase": 0.0}
)
# Apply dropout in the loop (probabilistic per-sample)
if np.random.rand() < dropout_rate:
yk_dropped = np.nan
else:
yk_dropped = yk
Y_wireless_true.append(yk)
Y_wireless_raw.append(yk_dropped)
# Convert to arrays
wireless_true = np.array(Y_wireless_true)
wireless_raw = np.array(Y_wireless_raw)
# Apply interpolation (requires neighbors, must be array-based)
wireless_interpolated = clean.with_interpolation(wireless_raw, method="linear")
# Apply staleness policy (hold) in a second loop
Y_wireless_hold = []
y_prev_hold = 0.0 # Initialize hold state
for yk in wireless_raw:
# Hold policy: forward-fill last valid value
if np.isnan(yk):
yk_hold = y_prev_hold
else:
yk_hold = yk
y_prev_hold = yk_hold
Y_wireless_hold.append(yk_hold)
wireless_hold = np.array(Y_wireless_hold)